Engineering Experience 4: Design a Small Solar Vehicle/Nl/Team PM7/Design rapport
Building a SSV
[edit | edit source]Materiaalkeuze
[edit | edit source]Voor de keuze van het materiaal van het frame wordt vooral gekeken naar de specifieke sterkte omdat dit de verhouding is tussen de sterkte en het gewicht. Deze waarde wordt ook in de ruimtevaart vooral gebruikt omdat ze hier zo licht mogelijk materiaal willen gebruiken. Dit is voor de wagen ook goed om sneller te kunnen gaan. De specifieke treksterkte is niet voor alle materialen terug te vinden maar deze worden dan berekend door de treksterkte te delen door de dichtheid. Hier volgen enkele waarden.
| Materiaal | E (Young’s modulus) | Rho (dichtheid) | Treksterkte | Specifieke treksterkte |
|---|---|---|---|---|
| Plexiglas | 3210 MPa | 1190 kg/m³ | 80 Mpa | 67.2 kNm/kg |
| Triplex (ply wood) | 12400 MPa | 615 kg/m³ | / | / |
| Balsa | 1130 – 6000 MPa | 150 kg/m³ | 0-75 Mpa
(gemiddeld 37.5 Mpa) |
250 kNm/kg |
| Aluminium | 70000 Mpa | 2702 kg/m³ | 600 MPa | 222 kNm/kg |
Dit waren enkele van de gevonden waarden waaruit blijkt dat balsa het beste materiaal is om te gebruiken. Dit is ook de reden waarom dit het hout is waaruit modelvliegtuigen en dergelijke gemaakt worden.
Het algemeen ontwerp
[edit | edit source]
Het geheel ontwerp bestaat uit het skelet van de wagen, de motor en de overbrenging, de geleidingswieltjes, het zonnepaneel en de wielen.
Het frame
[edit | edit source]Voor het frame hebben we verschillende ontwerpen bekeken in het programma Salomé en Code Aster (zie #Eindige_elementen_analyse ). Deze programma’s kunnen de spanningsverdeling weergeven over het frame onder een opgegeven belasting.
Als eerste ontwerp werd er gedacht aan een Y-structuur zoals op onderstaande figuur. De verticale balk hier op is de balk waar het zonnepaneel op bevestigd zou worden. Bij de simulatie van vervorming bleek dat dit ontwerp het meeste vervormde aan de achteras. Aangezien de vervorming daar zo klein mogelijk moet zijn om wrijving te voorkomen werd er verder gezocht naar andere ontwerpen.


De volgende figuur toont het tweede ontwerp. Zoals hier op te zien is, is de binnenste driehoek overbodig omdat hier niet veel ballast op komt te staan. Daarom werd in het laatste ontwerp hetzelfde model gebruikt maar dan zonder de binnenste driehoek. Er werd beslist dat het frame uiteindelijk zo zal uitgevoerd worden.


De simulaties zijn gedaan met een belasting op het hoogste punt (waar het zonnepaneel op rust). Er werd een belasting van 20N aangebracht, wat ongeveer 4 keer het gewicht van het zonnepaneel is.
Geleidingswieltjes
[edit | edit source]Het eerste idee van de zelfsturende voorwielen werd al snel verworpen omdat het weinig nut zou hebben. Tijdens de race beweegt de zonnewagen immers niet ver van zijn ideale lijn af.
Vervolgens werden kogellagers als voorwielen voorgesteld. Deze zouden zowel aan de voorkant van de wagen als aan de achterkant geholpen worden door kleine kogellagers die de wagen op de rail moeten houden. Door de kostprijs van de tandwielen, werd er echter gekozen om dit systeem te vervangen door een systeem waar de wagen met de voorkant rust op rail. Hierdoor werden 2 grote en kleine kogellager uitgespaard.


De achter-wielen
[edit | edit source]De achterwielen zijn bevestigd op een gelagerde as. Voor de achterwielen zijn er verschillende mogelijkheden. Er werd gedacht aan wieltjes van knex, wieltjes maken van CD’s of fenolische wielen (deze moeten dan via het internet besteld worden). De voorkeur ging uit naar het laatste omdat deze vrij weinig wrijving geven.
Uiteindelijk is beslist om de wielen uit plexiglas te snijden. Aangezien deze vrij weinig gewicht moesten dragen, konden ze licht gemaakt worden. Een gekocht wiel zou nog geboord moeten worden om de as in te laten passen. Aangezien het zeer moeilijk zou zijn om dit centrisch te doen, en er anders vrij veel trillingen zouden ontstaan is er voor gekozen dit niet te doen.

Verschillende overbrengingsmethodes
[edit | edit source]Via de zonnepanelen wordt een DC-motor aangestuurd die op zijn de beurt de wielen aandrijft. Er werden 3 mogelijkheden bedacht voor het overbrengingsmechanisme tussen de DC-motor en de wielen.
Conische as
[edit | edit source]Als eerste werd er gedacht aan een overbrenging waarbij een touw voor de start opgerold wordt op een conusvormige as die met de wielen verbonden is en bij aandrijving van de as afgerold wordt en op de aandrijvende as weer opgerold wordt. Een voordeel hiervan is dat door op de conusvormige as te wikkelen van de grote diameter naar de kleine men een versnelling zal krijgen. Het nadeel hierbij is dat de wagen niet oneindig zal blijven door gaan. Hij zal stoppen wanneer de draad volledig afgerold is. Wanneer de wagen van de baan gaat, kan het dus zijn dat deze niet meer zal rijden tegen dat hij terug op de baan gezet wordt.
Enkele overbrenging
[edit | edit source]Als tweede mogelijkheid is er ook een gewone tandwieloverbrenging.
Versnellingskast
[edit | edit source]Maar omdat het versnellen handig zou zijn werd dit systeem aangepast naar één waarbij men kan schakelen tussen twee snelheden. Hierbij is er wel meer verlies doordat er meerdere tandwielen gebruikt worden, maar kan men toch een tijdswinst maken.


Het principe van deze versnellingsbak, werkt op het veranderen van draairichting van de motor. Hierdoor zal een latje, met tandwielen op, verplaatst worden, zodat een andere overbrenging wordt aangedreven. De draairichting wordt bepaald door een H-brug die aangestuurd wordt door een chip. Deze chip bepaalt het ogenblik dat er geschakeld moet worden. Een drukknop zal de tijd op 0 zetten. Zodra de schakelaar los gelaten wordt, begint de tijd te lopen. De overbrenging heeft dus 2 verschillende paden. In Figuur 9 worden de paden weergegeven. In het groen is het vaste pad aangeduid van de motor tot aan waar het 2e pad gekozen wordt. De dikke as is de as waar de wielen op zitten. De motor is niet zichtbaar op deze figuur aangezien die achter het paneel zit. De voor en zijpanelen zijn weggelaten om de tandwielen zichtbaar te maken.
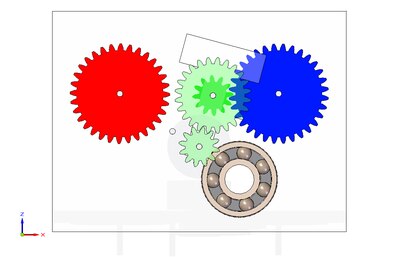
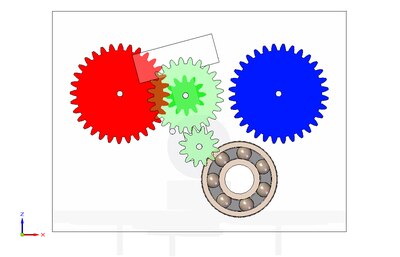
In Figuur 10 en Figuur 11 worden respectievelijk de aansturing van het blauwe en het rode pad weergegeven. De transparante groene tandwielen liggen in dit perspectief zowel voor de andere tandwielen op het schema, als de bewegende lat. Het kleine transparante tandwiel wordt rechtstreeks aangedreven door de motor. Het groene ondoorzichtige tandwiel ligt in het vlak van het rode en het blauwe tandwiel. Dit tandwiel zal het blauwe of het rode tandwiel aandrijven afhankelijk van de stand, en hangt op de zelfde as als het grote groene tandwiel. In Figuur 10 draait de motor in wijzerzin. Hierdoor kantelt de lat naar rechts, waardoor het groene ondoorzichtige tandwiel het blauwe tandwiel kan aandrijven. Hierdoor wordt het pad vervolledigd en wordt de as met de wielen aangedreven. In Figuur 11 draait de motor in tegenwijzerzin. Hierdoor kantelt de lat naar links en wordt het rode tandwiel aangedreven door het groene ondoorzichtige tandwiel.
Schakelen
[edit | edit source]
Het schakelen zal gebeuren met behulp van een chip. Deze chip zal ofwel na een gegeven tijd schakelen, ofwel de spanning meten en dan bij het optimale vermogen schakelen.
Het vermogen kan gemeten worden door de spanning te meten die uit het zonnepaneel komt. Met een spanningsverdeler wordt voorkomen dat er een te hoge spanning op de chip komt, en dat er teveel stroom verloren gaat via de meting. Aangezien de stroom-spannings karacteristiek van de zonnecellen bekend is, kan het vermogen hier uit afgeleid worden.
Het omwisselen van de draairichting gebeurt via een H-brug die door de chip gestuurd wordt.
Benodigde tandwielen berekenen via genetisch algoritme
[edit | edit source]Voor een enkele overbrenging is het vinden van de benodigde tandwielen triviaal. Voor een overbrenging met een versnellingsmechanisme is dit echter niet meer zo vanzelfsprekend. Er zijn immers 2 keer exact 3 overbrengingen die gebruikt moeten worden. De eerste 2 overbrengingen zijn voor beide versnelling de zelfde. De laatste overbrenging bepaalt echter welke overbrengingsverhouding bekomen zal worden en is dus verschillend voor de 2 versnellingen. Aangezien de eerste 2 overbrengingen echter gemeenschappelijk zijn, is er dus weinig keuzevrijheid.
Indien er voor elk aantal tanden, tandwielen ter beschikking zouden zijn en de maximum grootte niet van belang zou zijn, zou de oplossing voor de hand liggen. Dan kan men immers de eerste 2 overbrengingen neutraal houden en de overbrengingsverhouding in de laatste (niet gemeenschappelijke) overbrenging toepassen. In de praktijk is dit echter niet realistisch. De grootte van het maximum tandwiel is beperkt door de grootte van het wiel. Gebaseerd op de catalogus van SDP/SI, bestaat er ook niet voor elk aantal tanden een tandwiel. Een mogelijkheid is het zelf maken van tandwielen met de laser-cutter van het FabLab en Solid Edge. Vermoedelijk zou dit echter geen optimale resultaten leveren. Daarom is er een genetisch algoritme geschreven in Maple. Dit algoritme probeert aan de hand van de bestaande tandwielen een combinatie van tandwielen te zoeken die voldoet aan de juiste verhouding. Een andere optie zou zijn om zoals bij de overbrengingssimulatie in Maple, brute-force alle mogelijkheden af te gaan. Aangezien dit voor 30 soorten tandwielen echter een oplossingsruimte van 656 100 000 000 mogelijkheden oplevert, bekomt het genetisch algoritme sneller een resultaat en zal het indien er geen exacte oplossing is, een goede benadering als resultaat geven. Ter vergelijking, met het genetisch algoritme is er al na 1000 stappen een oplossing die de ideale overbrenging voldoende benadert om geen merkbaar verschil op te leveren.
Bij de uiteindelijke uitwerking kwamen er echter nog 3 andere voorwaarden bij.
De moeilijkste om rekening mee te houden was de kostprijs. Er zijn immers 10 tandwielen nodig. De prijzen per tandwiel gaan van 7 dollar tot 36,5 dollar voor een enkel tandwiel. Als hier niet op gelet wordt, zal het budget van 200 euro dus gemakkelijk overschreden kunnen worden. Om aan deze voorwaarde te voldoen, werd de prijs mee in de fitheid functie gestoken van het algoritme. Hoe duurder, hoe minder fit.
Vervolgens moeten de laatste tandwielen in de reeks ook voldoende groot zijn. De as met de wielen op heeft een diameter van 10mm. De tandwielen moeten dus groter zijn dan 10mm en nog plaats over hebben om de tanden op een stevige manier te bevatten. Ook hier voor werd een voorwaarde in de fitheidsfunctie gestoken.
Tenslotte kon niet elke tandwielcombinatie in de praktijk in een tandwielkast gestoken worden. De assen en de tandwielen hadden soms de neiging door elkaar te lopen. Een regel vinden voor dit probleem was echter minder gemakkelijk. Na een aantal combinaties te proberen, werd er een regel gevonden die combinaties gaf waarmee meestal een praktisch realiseerbaar resultaat bekomen kan worden.
Voor de overbrenging van 15,6 en 6,8 worden de volgende tandwielen gebruikt (aantal tanden) :
- Gemeenschappelijk : 12-25 en 12-36.
- Voor de overbrenging van 15,6 : 32-80
- Voor de overbrenging van 6,8 : 60-65
Voor meer detail over het algoritme en de broncode, kan je op de volgende pagina terecht.
Constructie
[edit | edit source]De constructie bleek niet gemakkelijk te zijn.
Eerst was er gekozen voor carbon assen voor de tandwielen op te monteren omdat deze vrij stijf zijn. Deze bleken echter teveel wrijving te hebben met het plexiglazen frame van de versnellingskast. De assen werden dan vervangen door messing assen. Deze hadden veel minder wrijving, maar nog steeds te veel. Vervolgens hebben we de contactpunten eerst met potlood gekleurd (grafiet) en tenslotte met machine olie. Ook dit bleek tijdens de test nog altijd vrij veel wrijving te hebben. Wat uiteindelijk in de race ook nog bevestigd is geweest. De 2e versnelling had namelijk teveel wrijving, waardoor de wagen stil viel. Er is dan ook besloten om enkel op de laagste versnelling te racen.
Met meer tijd hadden we de wrijving nog naar beneden kunnen halen. Door bijvoorbeeld de assen in aluminium te draaien, zouden de tandwielen beter op de assen gemonteerd kunnen worden. De binnendiameter van de tandwielen was namelijk niet bij elk tandwiel het zelfde. De assen zijn in dit geval met plakband dikker gemaakt tot de tandwielen er op pasten. Met gedraaide tandwielen zou dit perfect kunnen aangesloten worden.
Verder zou een beter inschatting van de wrijving ook 2 andere overbrengingscombinaties hebben opgeleverd.
Experimenten met de smering en eventueel kogellagers zouden de wrijvingscoëfficiënt tenslotte ook nog naar beneden kunnen halen.

Het zonnepaneel
[edit | edit source]De energie die men uit een zonnepaneel kan krijgen is afhankelijk van de lichtsterkte per oppervlakte-eenheid. Deze lichtsterkte is gericht. Zo komt het dat de energie zal verschillen afhankelijk van de richting die het zonnepaneel aanneemt. Dit kan men afleiden uit de volgende figuur. Over een doorsnede van 1 meter van de lichtstraal zal de lichtsterkte gelijk zijn maar onder een hoek van 90 graden zal er dus op een zelfde oppervlak twee keer meer licht kunnen invallen dan onder een hoek van 30 graden. Zo zal men onder een hoek van 90 graden dus maximale energie bekomen.
Het zonnepaneel wordt bovenop het skelet bevestigd met behulp van een kogelgewricht. Dit maakt het mogelijk om het zonnepaneel te richten om meer zonlicht op te vangen.
Race
[edit | edit source]Constructie zonnewagen
[edit | edit source]Zoals eerder vernoemd, zat ver weg de meeste tijd in de constructie van de versnellingskast. Aangezien er 10 tandwielen in een vrij kleine plaats moesten gemonteerd worden, heeft dit aardig wat tijd in beslag genomen.
Het grootste probleem zat bij de montage van de as op de motor. Aangezien wij een lange as nodig hadden voor ons systeem konden we niet onmiddellijk een tandwiel op deze as plaatsen. Een extra overbrenging zou extra verliezen met zich mee brengen.
Er is achtereenvolgens getracht om de as te lijmen met een lijmpistool, te solderen, te lijmen met secondelijm en de as toe te knijpen. Dit laatste tenslotte leverde een bruikbaar, doch nog altijd niet betrouwbaar resultaat op.

Resultaat
[edit | edit source]In de poule waar we in zaten hebben we 2 keer gewonnen, waardoor we de poule dus gewonnen hebben. De eerst volgende race hebben we echter verloren.
De eerste race is er getracht om te vertrekken met het versnellingssysteem. Toen de wagen stil viel in 2e versnelling zijn we overgeschakeld naar het rechtstreeks aansturen van de motor met het zonnepaneel in 1e versnelling. De tegenstander in deze race had eveneens problemen, waardoor we de race toch nog gewonnen hebben.
De volgende races hebben we op 1e versnelling gereden.
Bronnen
[edit | edit source]Algemene bronnen
[edit | edit source]a technical guide to building fighting robots. (n.d.). Retrieved from http://robots.freehostia.com/Materials/MaterialsBody.html
matbase a leap forward in material data. (n.d.). Retrieved from http://www.matbase.com/material/wood/class4-5-10-years/balsa/properties
natuurinformatie/darwinjaar 2009. (n.d.). Retrieved from http://www.natuurinformatie.nl/nnm.dossiers/natuurdatabase.nl/i002046.html
northwest caster and equipment. (n.d.). Retrieved from http://www.nwcaster.com/dept.aspx?d_id=25123
toledo. (n.d.). Retrieved from https://cygnus.cc.kuleuven.be/webapps/portal/frameset.jsp?tab=null&url=/webapps/blackboard/execute/courseMain?course_id=_374226_1
working with balsawood. (n.d.). Retrieved from http://pldaniels.com/flying/balsa/balsa-properties.html
world lingo translation localization globalization. (n.d.). Retrieved from http://www.worldlingo.com/ma/enwiki/nl/Specific_strength
Software
[edit | edit source]Eindige elementen analyse
[edit | edit source]De eindige elementen analyse is gedaan onder CAE Linux (Computer Aided Linux). Dit is een Ubuntu gebaseerde Linux distributie, waar stadaard allerhande ingenieurspakketen op geïnstalleerd staan. De gebruikte pakketen zijn hier specifiek Salomé en Code Aster. Salomé is een overkoepelend pakket, wat een workflow creëert voor de eindige elementen analyse. Code Aster is de toepassing die de eigenlijke analyse doet.
CAElinux : http://www.caelinux.com/CMS/
Salome : http://www.salome-platform.org/
Code Aster : http://www.code-aster.org/V2/spip.php?rubrique2